研究内容
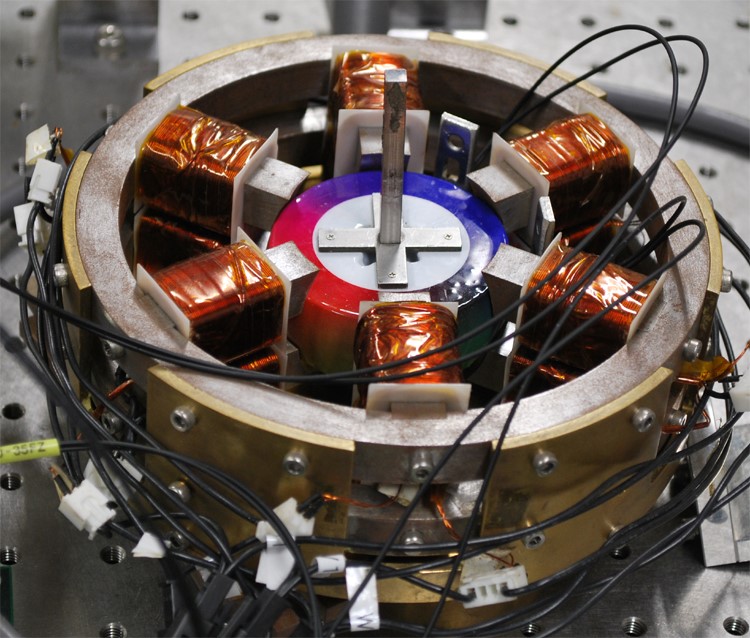 |
人間の手首関節や肩関節のように,1台で2,3自由度の回転運動が可能な電磁アクチュエータの研究を行っています.モータやその他部品の数を減らせることによる構造の小型・簡単化や,位置決め精度の向上に貢献する重要な技術です.球面アクチュエータ自体の開発だけに留まらず角度センシング手法,制御手法,特性評価手法など幅広い研究を行っています. |
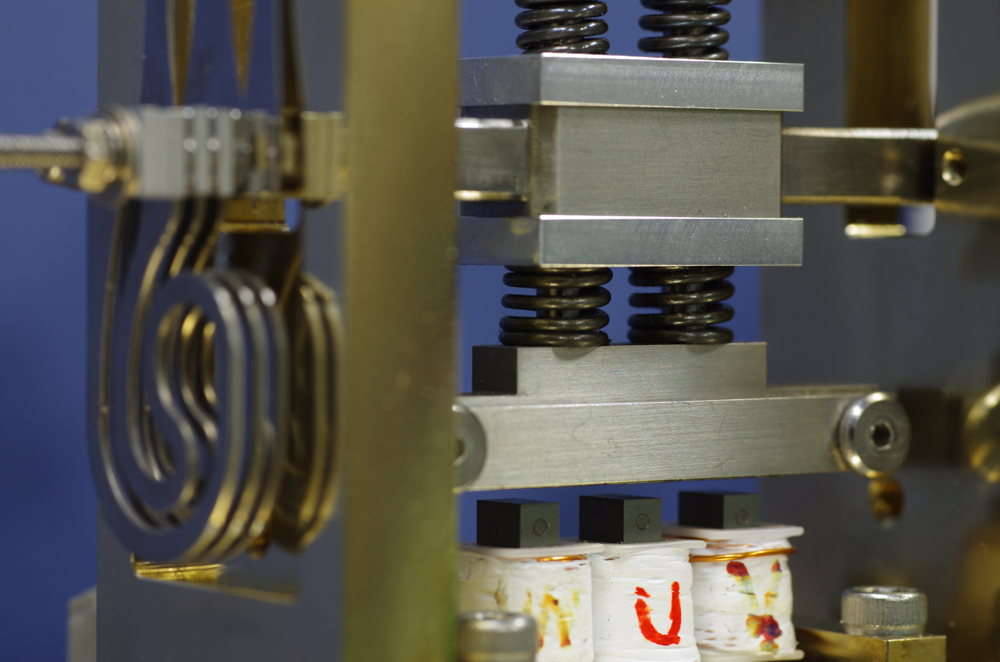 |
リニア振動アクチュエータは小型・軽量な構造を有し,短いストロークでの高速往復運動が可能です.また共振周波数で駆動することにより,高効率な動作が実現可能です.これらのアクチュエータの高性能化,多自由度化,制御方法の研究を行っています. |
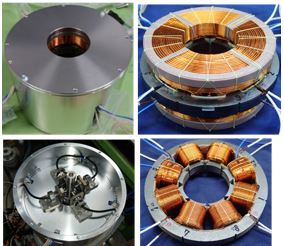 |
磁気支持・浮上システムは機械的接触による摩耗が発生せず,メンテナンスフリーで運用可能など様々な利点を有しています。本研究室では,複数の磁気軸受を一体化し,1台でロータを多軸支持・浮上可能な多軸能動制御型磁気軸受を開発しています。また,磁気ねじと磁気軸受を一体化した磁気浮上送りねじ機構の研究を行っています。 |
 |
リニア電磁アクチュエータや磁気ねじにより駆動するアクチュエータをはじめとして様々な構造・機構を有する新しいリニアアクチュエータの研究を行っています。人共存型ロボットや産業用機械を適用先としてその制御方法及び動作特性の検証を行っています。 |
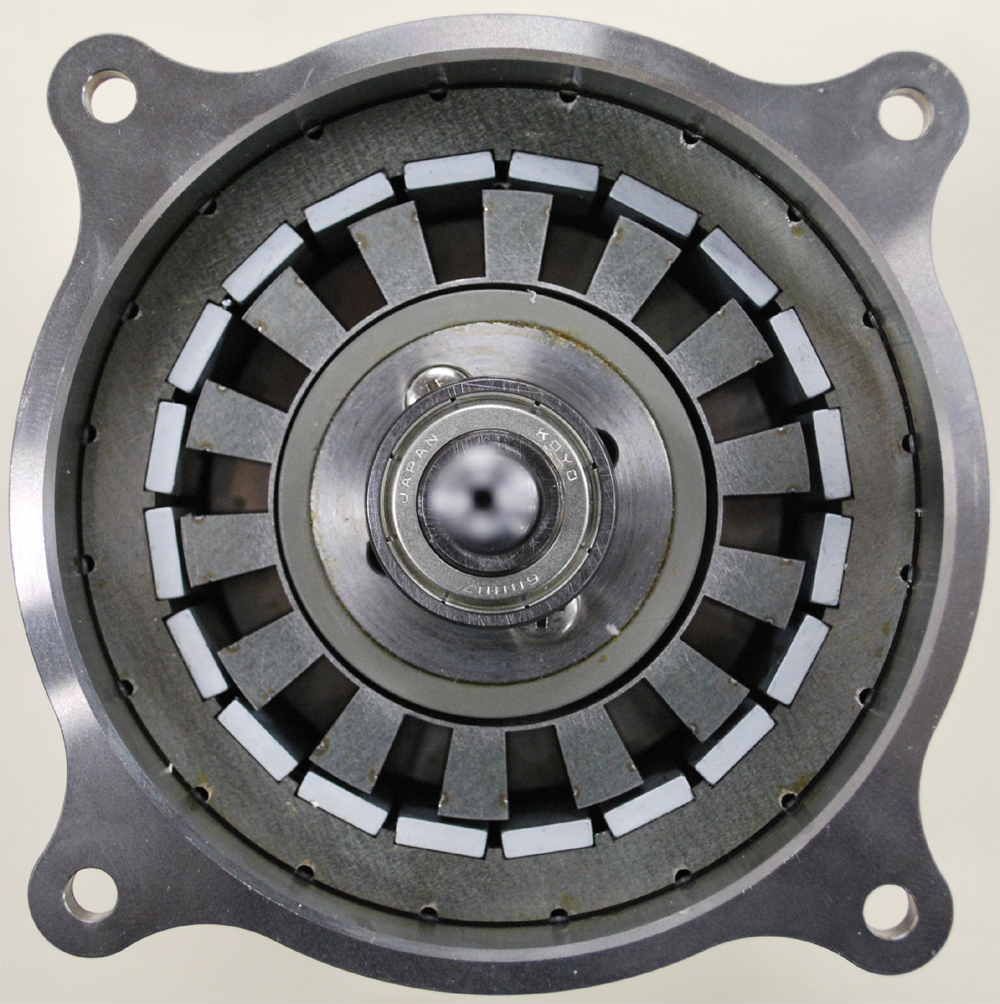 |
一般的な回転機に加え,非接触で動力を伝達可能な磁気ギアやモータを一体化した磁気ギアードモータなどの新しいモータの研究を行っています.単にモータだけでなく,新しいモータ制御,パワーエレクトロニクス(インバータ)技術との融合研究に取り組んでいます. |
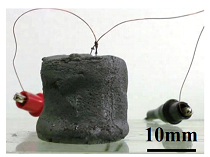 |
磁性エラストマや感温磁性材料,超磁歪材料をはじめとした様々な新材料を用いた新しいアクチュエータの開発を行っています。材料特性を活かした柔軟な応答や,スイッチング動作を実現しており,今後様々な応用が期待できます. |
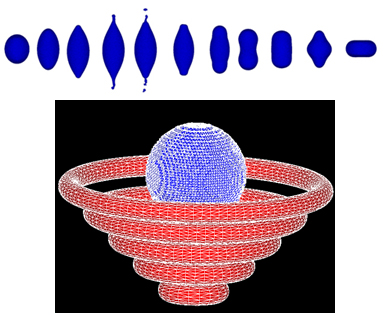 |
粒子法はメッシュを用いず,計算点のみで解析を行うことができる手法です.従来の有限要素法の課題である大変形時のメッシュの破壊やリメッシュの必要性とは無縁であり,物体の大変形や分裂・合体といった現象の数値解析に適しているとして期待されています.本研究では,電磁流体やボンド磁石の射出成形など大変形を伴う複雑な物理現象を解明するために,流体解析には粒子法(MPS・DEM・重み付き最小二乗法など)を用いて,磁場解析(磁気モーメント法・FEM・メッシュフリー法・BEM)や熱解析(MPS・重み付き最小二乗法)との連成解析手法の開発を行っている. |