尋媶撪梕
偦偺懠
丒旕愙怗幃億僕僔儑儞僙儞僒
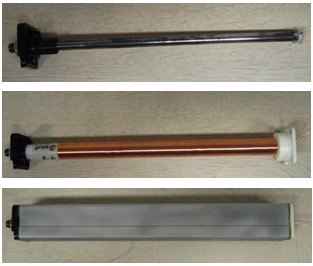 |
儘儃僢僩偺娭愡晹側偳偺埵抲寛傔偵偼丆億僕僔儑儞僙儞僒偑昁梫晄壜寚偱偡丏廬棃偼丆愙怗幃偺億僥儞僔儑儊乕僞偑梡偄傜傟偰偄傑偟偨偑丆愙怗晄椙側偳丆怣棅惈偺栤戣偑偁傝丆変乆偼岎棳揹埑傪報壛偟偨僐僀儖偺僀儞僺乕僟儞僗曄壔傪専抦偡傞旕愙怗幃億僕僔儑儞僙儞僒偺奐敪傪峴偭偰偄傑偡丏 |
僥乕儅徯夘梡帒椏(妛夛敪昞)僟僂儞儘乕僪(pdf宍幃)
PDF
丒僗僩儘乕僋儕僙僢僩僙儞僒
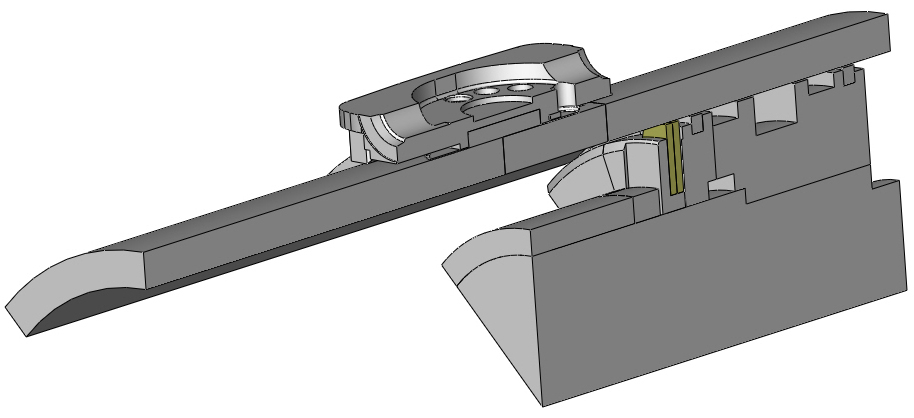 |
寶愝婡夿偺傾乕儉丆僽乕儉丆僶働僢僩偺埵抲傪惓妋偵攃埇偡傞偙偲偼丆帺摦塣揮偵偼寚偐偣側偄媄弍偱偡丏尰忬丆條乆側僙儞僒傪梡偄偰埵抲傪攃埇偟偰偄傑偡偑丆僐僗僩傗庢埖偄偵栤戣偑偁傝傑偡丏偦偙偱丆変乆偼丆僗僩儘乕僋僙儞僒偲儕僙僢僩僙儞僒偺慻傒崌傢偣偱惛搙傪摼傜傟傞傛偆丆尋媶偟偰偄傑偡丏 |
丒彫宆朞榓塓揹棳扵彎憰抲
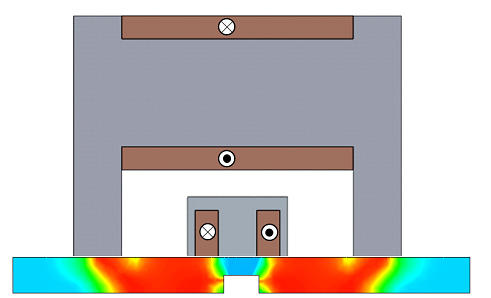 |
崙撪偺悈摴娗偺偆偪丆40擭埲忋巊梡偝傟偨榁媭娗楬偼8%偱偡偑丆峏怴棪偼1%偱丆崱屻丆榁媭娗偑憹壛偡傞偙偲偑梊應偝傟偰偄傑偡丏偦偙偱丆桪愭弴埵傪偮偗偰峏怴偡傞偨傔丆娗偺晠怘忬嫷傪旕孈嶍偱挷嵏偱偒傞媄弍偺奐敪偑昁梫偱偡丏悈摴娗撪柺偐傜奜柺偺晠怘傪挷嵏偡傞偨傔丆廬棃偺塓揹棳扵彎朄偼巊偊傑偣傫丏偦偙偱丆変乆偼丆朞榓塓揹棳扵彎朄傪夵椙偟偨撈帺偺扵彎朄傪奐敪偟偰偄傑偡丏 |